State space
State vector
Assuming the target’s motion on the two-dimensional own-ship’s tracking plane, then two different state-space descriptions can be used depending on the expression of the velocity vector:
Cartesian velocity model $$\mathbf{x} = \left[x,y,\dot{x}, \dot{y},\omega\right]^{T} $$
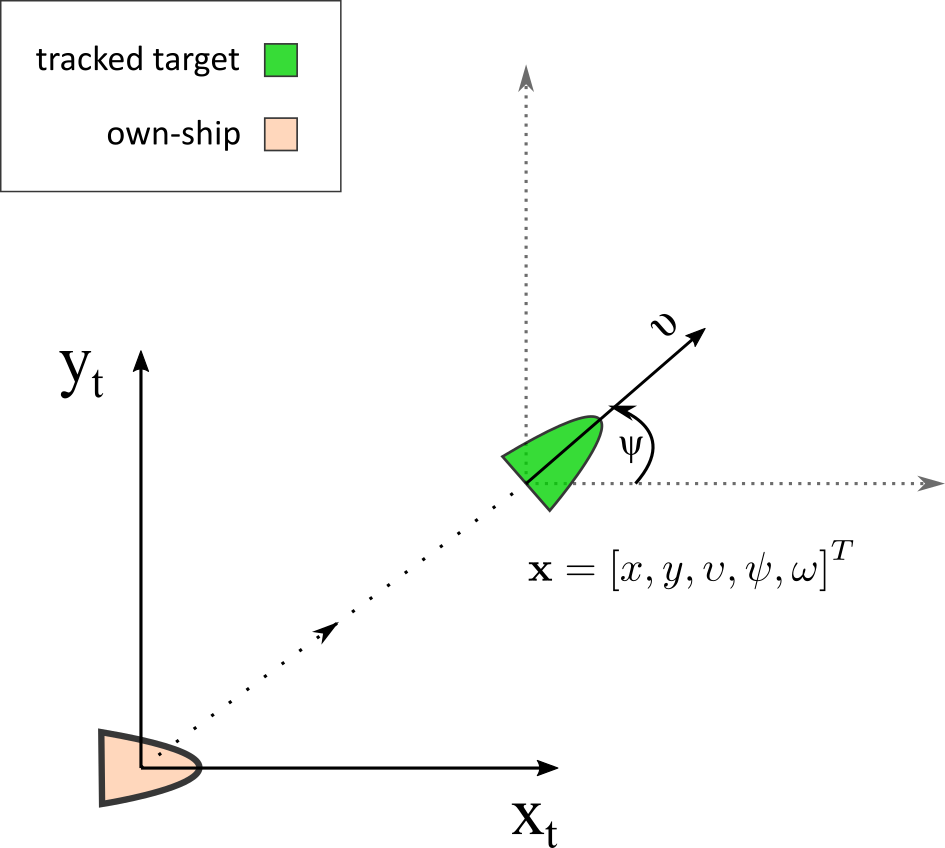
Polar velocity model $$\mathbf{x} = \left[x,y,\upsilon, \psi,\omega\right]^{T} $$
where
$$ \begin{align*} \upsilon &= \sqrt{\dot{x}^2 + \dot{y}^2} \\ \psi &= \arctan\left(\frac{\dot{y}}{\dot{x}}\right) \\ \omega &= \dot{\psi} \end{align*} $$
$(x,y)$ is the displacement relative to the local self-body fixed coordinate system
$\upsilon$ is the target’s linear velocity
$\psi$ is the heading angle w.r.t the tracking system’s x-axis.
$\omega$ is the turn-rate of the target
all expressed w.r.t the own-ship’s tracking coordinate system.
Dimitrios Dagdilelis
ML/AI Engineer
Hey there, I enjoy making machines observe the world. If you have something interesting to share, there is no better time that now, connect with me and lets discuss.