Tracking as an estimation problem
The problem
[Multitarget-multisensor Tracking: Principles and Techniques : Yakkov Bar-Shalom Xiao-Rong Li]
The generation of information that has the following properties
- Quality (accuracy/reliability) higher than the raw measurements
- Contains information not directly available in the measurements
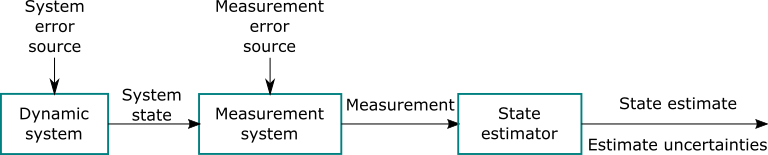
Note that in the figure above,
- No access to variables inside the first two blocks
- The only accessible variable are the measurements which are affected by noise.
The estimator
Uses knowledge and processes the measurements to yield an estimate of a variable of interest(state or state uncertainty), while trying to make best use of the available data. In this process it is taking into account the:
- System dynamics
- Sensor Models
- Prior information & probabilistic nature of the uncertainties
Dimitrios Dagdilelis
ML/AI Engineer
Hey there, I enjoy making machines observe the world. If you have something interesting to share, there is no better time that now, connect with me and lets discuss.